#include <mpp/ptgs/DiffDrive_C.h>
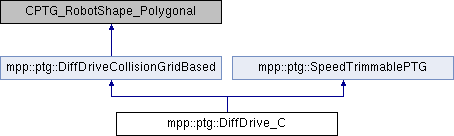
Inheritance diagram for mpp::ptg::DiffDrive_C:
Public Member Functions | |
| DiffDrive_C ()=default | |
| DiffDrive_C (const mrpt::config::CConfigFileBase &cfg, const std::string &sSection) | |
| void | loadFromConfigFile (const mrpt::config::CConfigFileBase &cfg, const std::string &sSection) override |
| void | saveToConfigFile (mrpt::config::CConfigFileBase &cfg, const std::string &sSection) const override |
| std::string | getDescription () const override |
| bool | inverseMap_WS2TP (double x, double y, int &out_k, double &out_d, double tolerance_dist=0.10) const override |
| bool | PTG_IsIntoDomain (double x, double y) const override |
| void | ptgDiffDriveSteeringFunction (float alpha, float t, float x, float y, float phi, float &v, float &w) const override |
| void | loadDefaultParams () override |
 Public Member Functions inherited from mpp::ptg::DiffDriveCollisionGridBased Public Member Functions inherited from mpp::ptg::DiffDriveCollisionGridBased | |
| double | getMax_V () const |
| double | getMax_W () const |
| bool | inverseMap_WS2TP (double x, double y, int &out_k, double &out_d, double tolerance_dist=0.10) const override |
| mrpt::kinematics::CVehicleVelCmd::Ptr | directionToMotionCommand (uint16_t k) const override |
| mrpt::kinematics::CVehicleVelCmd::Ptr | getSupportedKinematicVelocityCommand () const override |
| void | setRefDistance (const double refDist) override |
| size_t | getPathStepCount (uint16_t k) const override |
| mrpt::math::TPose2D | getPathPose (uint16_t k, uint32_t step) const override |
| double | getPathDist (uint16_t k, uint32_t step) const override |
| bool | getPathStepForDist (uint16_t k, double dist, uint32_t &out_step) const override |
| double | getPathStepDuration () const override |
| double | getMaxLinVel () const override |
| double | getMaxAngVel () const override |
| void | updateTPObstacle (double ox, double oy, std::vector< double > &tp_obstacles) const override |
| void | updateTPObstacleSingle (double ox, double oy, uint16_t k, double &tp_obstacle_k) const override |
| void | onNewNavDynamicState () override |
| Public Member Functions inherited from mpp::ptg::SpeedTrimmablePTG | |
| SpeedTrimmablePTG ()=default | |
| ~SpeedTrimmablePTG ()=default | |
Protected Attributes | |
| double | K {0} |
| Protected Attributes inherited from mpp::ptg::DiffDriveCollisionGridBased | |
| double | V_MAX {.0} |
| double | W_MAX {.0} |
| double | turningRadiusReference {.10} |
| std::vector< TCPointVector > | m_trajectory |
| double | m_resolution {0.05} |
| double | m_stepTimeDuration {0.01} |
| CCollisionGrid | m_collisionGrid |
| mrpt::containers::CDynamicGrid< TCellForLambdaFunction > | m_lambdaFunctionOptimizer |
Additional Inherited Members | |
| Public Attributes inherited from mpp::ptg::SpeedTrimmablePTG | |
| double | trimmableSpeed_ = 1.0 |
| Protected Types inherited from mpp::ptg::DiffDriveCollisionGridBased | |
| using | TCollisionCell = std::vector< std::pair< uint16_t, float > > |
| Protected Member Functions inherited from mpp::ptg::DiffDriveCollisionGridBased | |
| DiffDriveCollisionGridBased () | |
| void | internal_processNewRobotShape () override |
| void | internal_initialize (const std::string &cacheFilename=std::string(), const bool verbose=true) override |
| void | internal_deinitialize () override |
| void | loadFromConfigFile (const mrpt::config::CConfigFileBase &cfg, const std::string &sSection) override |
| void | saveToConfigFile (mrpt::config::CConfigFileBase &cfg, const std::string &sSection) const override |
| void | loadDefaultParams () override |
| void | internal_readFromStream (mrpt::serialization::CArchive &in) override |
| void | internal_writeToStream (mrpt::serialization::CArchive &out) const override |
| void | simulateTrajectories (float max_time, float max_dist, float dt) |
| mrpt::math::TTwist2D | getPathTwist (uint16_t k, uint32_t step) const override |
| bool | saveColGridsToFile (const std::string &filename, const mrpt::math::CPolygon &computed_robotShape) const |
| bool | loadColGridsFromFile (const std::string &filename, const mrpt::math::CPolygon ¤t_robotShape) |
Detailed Description
A PTG for circular paths ("C" type PTG in papers).
- Compatible kinematics: differential-driven / Ackermann steering
- Compatible robot shape: Arbitrary 2D polygon
- PTG parameters: Use the app
ptg-configurator
This PT generator functions are:
![\[ v(\alpha) = V_{MAX} sign(K) \]](form_0.png)
![\[ \omega(\alpha) = \dfrac{\alpha}{\pi} W_{MAX} sign(K) \]](form_1.png)
So, the radius of curvature of each trajectory is constant for each "alpha" value (the trajectory parameter):
![\[ R(\alpha) = \dfrac{v}{\omega} = \dfrac{V_{MAX}}{W_{MAX}} \dfrac{\pi}{\alpha} \]](form_2.png)
from which a minimum radius of curvature can be set by selecting the appropriate values of V_MAX and W_MAX, knowning that  .
.

- Note
- [Before MRPT 1.5.0 this was named CPTG1]
Constructor & Destructor Documentation
◆ DiffDrive_C() [1/2]
|
default |
◆ DiffDrive_C() [2/2]
|
inline |
Member Function Documentation
◆ getDescription()
|
override |
◆ inverseMap_WS2TP()
|
override |
◆ loadDefaultParams()
|
override |
◆ loadFromConfigFile()
|
override |
◆ PTG_IsIntoDomain()
|
override |
◆ ptgDiffDriveSteeringFunction()
|
overridevirtual |
The main method to be implemented in derived classes: it defines the differential-driven differential equation
Implements mpp::ptg::DiffDriveCollisionGridBased.
◆ saveToConfigFile()
|
override |
Member Data Documentation
◆ K
|
protected |
A generation parameter
The documentation for this class was generated from the following file:
- /home/docs/checkouts/readthedocs.org/user_builds/selfdriving/checkouts/latest/mrpt_path_planning/include/mpp/ptgs/DiffDrive_C.h
